

Post written by Minho Hwang, PhD, and Seung Woo Lee, MD, PhD, from the Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology (KAIST), Daejeon, and the Division of Gastroenterology, Department of Internal Medicine, College of Medicine, The Catholic University of Korea, Seoul, Republic of Korea.
This study aimed to evaluate the feasibility of a new traction method using a dexterous robotic arm (PETH) in ex vivo gastric endoscopic submucosal dissection (ESD). The PETH was designed to be attached to a conventional endoscope by adjusting the number and direction of the robotic arm, depending on the type of endoscopic procedure. Various standard accessory instruments can be introduced and actively guided through the internal channel provided by the robot arm.
ESD is considered technically difficult and challenging using a conventional flexible endoscope, mainly due to the lack of proper countertraction to expose the submucosal dissection plane. Various methods have been attempted to achieve proper countertraction during ESD. However, they have limitations in that the direction of traction is not adjustable and regrasping is not allowed. The countertraction method using the PETH significantly improved the dissection speed and reduced blind dissection by enhancing direct visualization of the submucosal plane. With the advantages of multidirectional traction, fine-tension control, and regrasping, this new device is expected to improve the performance of ESD and further facilitate advanced endoscopic procedures. After modifcations and refinement of PETH , human application and the ESD trial of other parts like the colon and esophagus will also be possible.
Our results provide a clear distinction in terms of the procedure time, dissection speed, blind dissection rate, and injection volume between PETH-ESD and conventional ESD achieved by enhancing direct visualization of the submucosal plane. We expect that with multiple robotic arms, the proposed device would facilitate endoscopic procedures such as natural orifice transluminal endoscopic surgery as well as advanced endoscopic procedures.
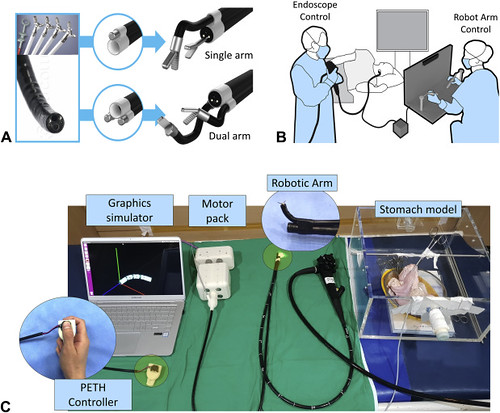
Figure 1. A, The PETH was designed to be attached to a conventional endoscope by adjusting the number and direction of the robotic arms depending on the type of endoscopic procedure. B, Operation of the PETH is intended to assist the main doctor in manipulating the endoscope in a conventional manner by controlling the robot arm using the master device. C, The PETH comprises a robotic arm, master device, graphics simulator, and motor pack.
Read the full article online.
The information presented in Endoscopedia reflects the opinions of the authors and does not represent the position of the American Society for Gastrointestinal Endoscopy (ASGE). ASGE expressly disclaims any warranties or guarantees, expressed or implied, and is not liable for damages of any kind in connection with the material, information, or procedures set forth.
